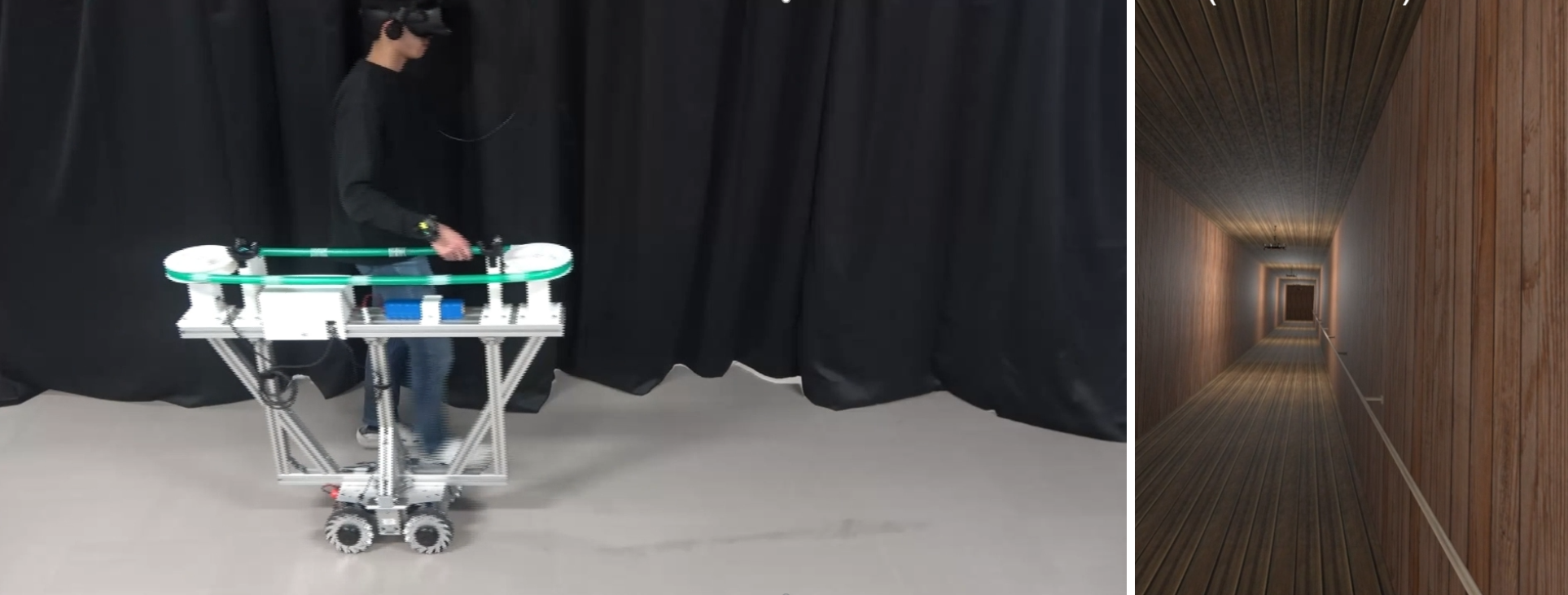
単一のユーザー追従ロボットのみを使用して,接地された物体からの触覚フィードバックを備えた無限の手すりを提供する新しい技術,LoopBotを提案しました.LoopBotは,全方位移動ロボットに取り付けられたループ状の触覚プロップを搭載しており,ロボットの変位を相殺するようにスクロールすることで,プロップが実際に固定されているかのように,つまり「接地されている」かのように,ユーザーに触覚感覚を提供することができます.
研究成果は,米・ピッツバーグで開催された ACM主催のHuman-Computer Interaction 分野のトップコンファレンス ACM Symposium on User Interface Software and Technology (UIST) 2024 に採択され,口頭発表を行いました.
テーマ
サイバー/バーチャル空間で無限に続く手摺を実現

主な研究成果・対外発表
Results in Japanese are described in Japanese.