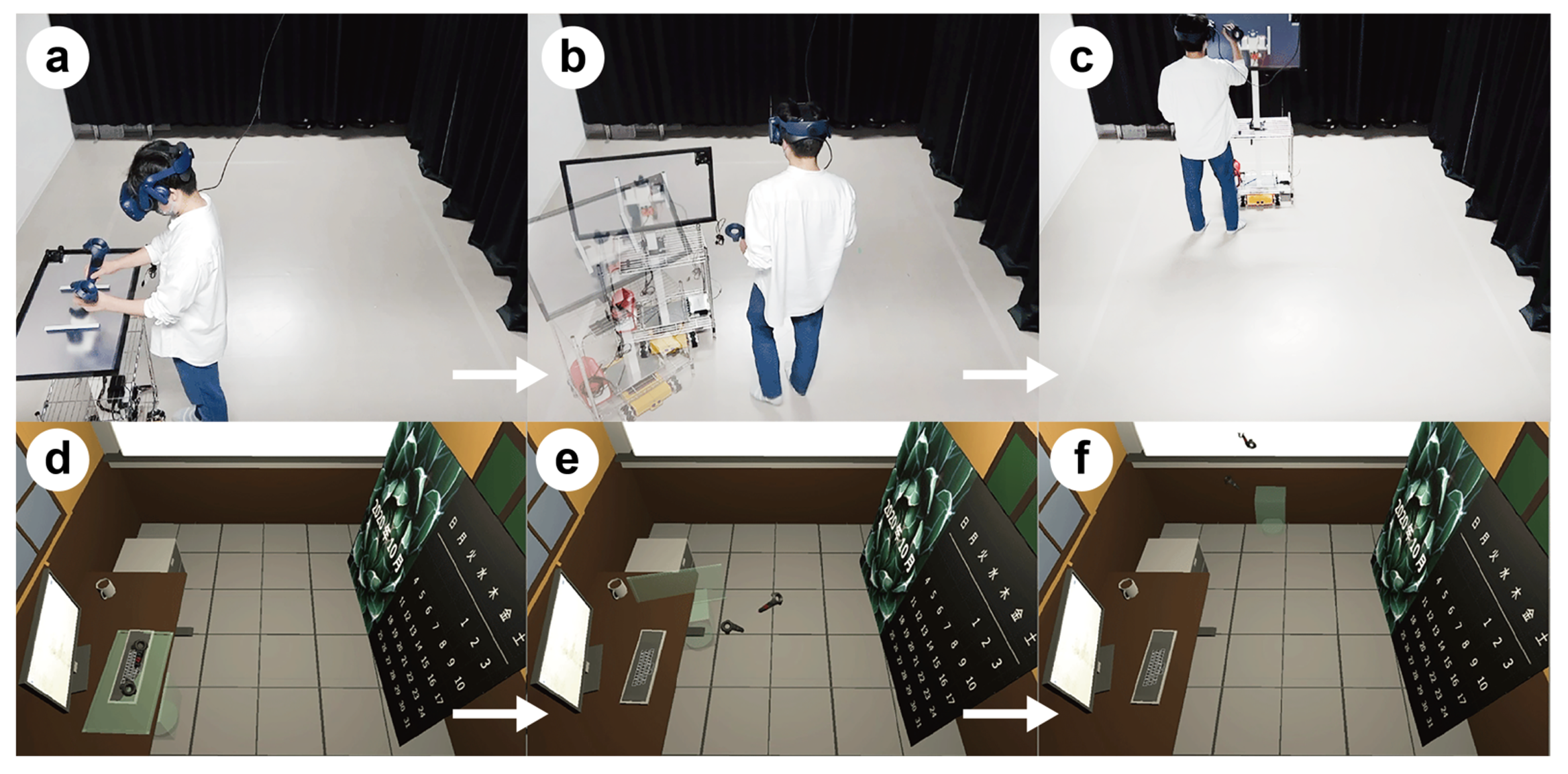
ルームスケールのサイバー/バーチャル空間は,物理的なオフィスワークスペースの代替と考えられてきました.オフィスでの作業では,サイバー/バーチャル空間内のコンテンツへの注釈などを素早く記録するために,タイピングや手書きといった平面での入力方法を必要とすることがよくあります.しかし、現在一般に普及しているVR HMDのセットアップでは,腕の疲労を引き起こし,入力精度を低下させる可能性のある空中インタラクションに依存しています.この問題に対処するため,我々は,バーチャルな入力平面(VRホワイトボードやVRキャンバスなど)を物理的にユーザに提示するために,自動的に位置を変え,ユーザが仮想の部屋を歩き回りながら正確で疲労の少ない入力を達成できるようにするロボットタッチサーフェスである,UbiSurfaceを提案しました.キャンバスサイズのタッチサーフェスの位置,高さ,ピッチとヨーの角度を動的に変化させることができるUbiSurfaceのプロトタイプを設計し,実装することで,サイバー/バーチャル空間の様々な位置と角度に配置されたバーチャルサーフェスに適応します.次に,その技術的性能を検証するための研究を実施し,UbiSurfaceがルームスケールのVRセットアップにおいて,ペインティングやライティングなど,ユーザの主要な空中平面インタラクションをどのように支援するかを検証しました.実験結果は,このシステムが腕の疲労を軽減し,特に,書くタスクにおいて入力精度を向上させることを示しました.次に,将来のルームスケールVRセットアップにおけるロボットタッチデバイスの潜在的な利点と課題について議論しました.
本研究は,Proceedings of the ACM on Human-Computer Interaction 誌に掲載され,国際会議 ACM Interactive Surfaces and Spaces Conference (ISS) 2023で口頭発表されました.
テーマ
ルームスケールのサイバー/バーチャル空間における空中平面インタラクションを支援するロボットタッチサーフェス
主な研究成果・対外発表
- Ryota Gomi, Kazuki Takashima, Yuki Onishi, Kazuyuki Fujita, and Yoshifumi Kitamura. UbiSurface: A Robotic Touch Surface for Supporting Mid-air Planar Interactions in Room-Scale VR, Proceedings of the ACM on Human-Computer Interaction, Volume 7, Issue ISS, Article No.: 443, pp. 376–397, 2023
- デモ動画
Results in Japanese are described in Japanese.