サイバー/バーチャル空間は無限の広がりを持たせることができますが,リアル/フィジカル空間はそうはいきません.実際に歩行することでサイバー/バーチャル空間内を探索する「ルームスケールVR」体験は,まるでその世界に入り込んだような高い没入感をもたらすことから,近年,幅広い分野での応用が期待されています。しかし,大きな物理空間を必要とすることや,触覚のフィードバックが得られないことが大きな障壁となっていました.
そこで本研究では,これらの制約を解消し限られた物理空間内で実現可能にするため,独自の新システム「RedirectedDoors」と「RedirectedDoors+」を開発しました.このシステムは,バーチャル/サイバー空間内で複数のドアを連続的に開けて歩行する際に,ユーザの歩く方向を「だまし」,物理空間の壁にぶつからないようユーザを誘導するとともに、ドアノブのリアルな触覚を再現します.
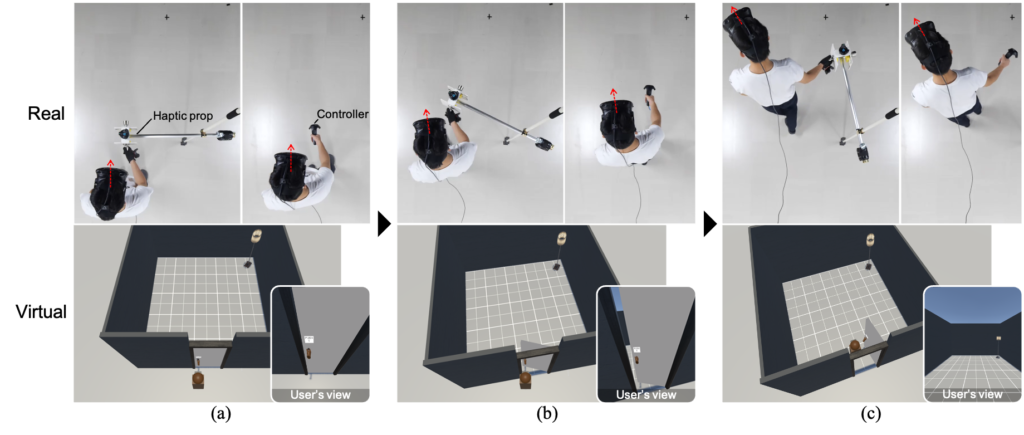
「RedirectedDoors」は,ユーザがサイバー/バーチャル空間内でドアを開けて前方に進む際にユーザに気づかれない程度に サイバー/バーチャル 空間全体を回転させることで、ユーザの進行方向をだますリダイレクション手法です.ユーザスタディの結果,この手法が既存手法よりも大きく進行方向をだませる(1度の開扉につき平均54.7度)ことや,触覚フィードバックが体験のリアリティ向上につながることを明らかにしました.しかしこの手法は,特定位置に固定されたドアを 1 度通過する動作のみを対象としており,ユーザが歩き回るルームスケールVR体験への対応を考慮していませんでした. 「RedirectedDoors+」は,RedirectedDoorsを大幅に拡張し,複数のドアを連続的に開けながらバーチャル/サイバー空間内を歩行する体験での触覚フィードバックを提示するとともに,この体験が限られた物理空間内に収まるようにユーザの進行方向をだまして誘導することを実現したシステムです.本システムでは,ドアノブの触覚フィードバックを提示するために,全方位自走式ロボットの上にドアノブ型の装置を搭載した「ドアロボット」を開発しました。さらに、このロボット複数台の配置を適応的に決定するための「ロボット配置アルゴリズム」,および,ユーザの歩行経路が物理空間内に収まるようユーザを誘導する「ユーザステアリングアルゴリズム」を新たに開発しました。.本システムの性能評価のために実施したシミュレーションスタディでは,形状の異なる6種類のサイバー/バーチャル環境において,歩行体験に必要な物理空間のサイズ(歩行軌跡が収まる長方形の対角線長)を,平均 74%まで圧縮できることを示しました.また,本システムを用いた歩行体験を実際に12 人のユーザに体験してもらい,本システムが実環境で安全に動作することを示しました.
本手法は,VR職業トレーニング,建築・都市計画をはじめとしたVRウォークスルー体験に適用できるため,様々な分野への応用が期待されます.
本研究成果は、2024年3月11日にIEEE(米国電子情報学会)の科学誌IEEE Transactions on Visualization and Computer Graphicsのオンライン速報版に掲載され,VR分野で最大の重要国際会議である IEEE Conference on Virtual Reality and 3D User Interfaces (IEEE VR & 3DUI 2024, 3月16〜21日,米国・オーランド) で口頭発表されました.
テーマ
無限に広がるサイバー/バーチャル空間を狭い部屋で歩き回わる


主な研究成果・対外発表
- Yukai Hoshikawa, Kazuyuki Fujita, Kazuki Takashima, Morten Fjeld, Yoshifumi Kitamura: RedirectedDoors+: Door-Opening Redirection with Dynamic Haptics in Room-Scale VR, IEEE Transactions on Visualization and Computer Graphics, 2024.
- RedirectedDoors+ 動画
- Yukai Hoshikawa, Kazuyuki Fujita, Kazuki Takashima, Morten Fjeld, Yoshifumi Kitamura. RedirectedDoors: Redirection While Opening Doors in Virtual Reality, Proc. of IEEE Conference on Virtual Reality and 3D User Interfaces (IEEE VR & 3DUI), pp. 464-473, Mar. 2022. 【Honorable Mention Award.】
- RedirectedDoors 動画
- プレスリリース
Results in Japanese are described in Japanese.