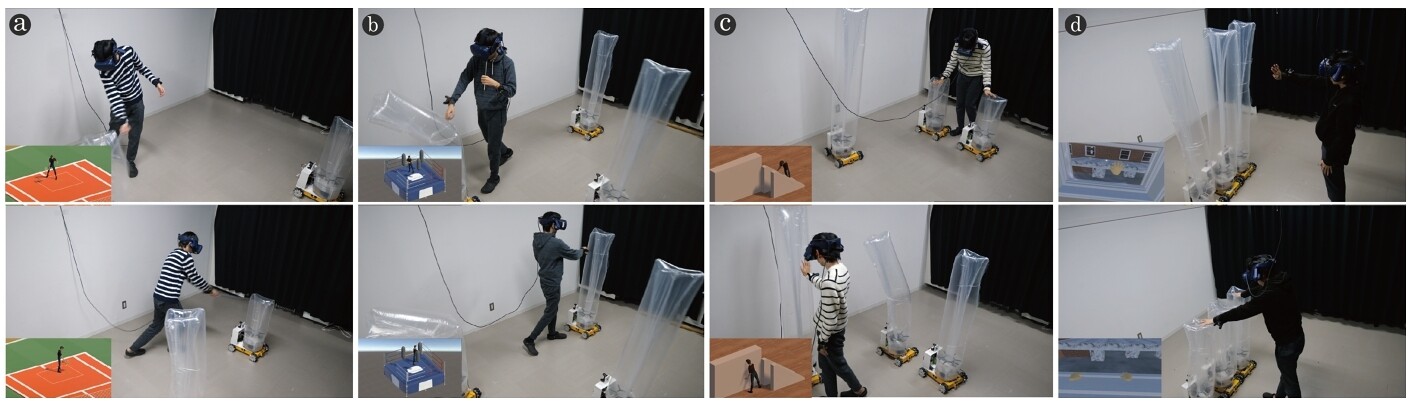
We propose InflatableBots, shape-changing inflatable robots for large-scale encountered-type haptics in cyber/virtual space. Our approach combines mobile robots with fan-based inflatable structures. This enables safe, scalable, and deployable haptic interactions on a large scale. Multiple inflatable mobile robots can be coordinated, each of which consists of an omni-directional mobile base and a reel-based inflatable structure. The robot can simultaneously change its height and position rapidly.
This research was accepted for a paper and oral presentation at the top conference on ACM SIGCHI Conference on Human Factors in Computing Systems (CHI 2024)I.
テーマ
Large-scale Encountered-type Haptics in Cyber/Virtual Space

主な研究成果・対外発表
Results in Japanese are described in Japanese.