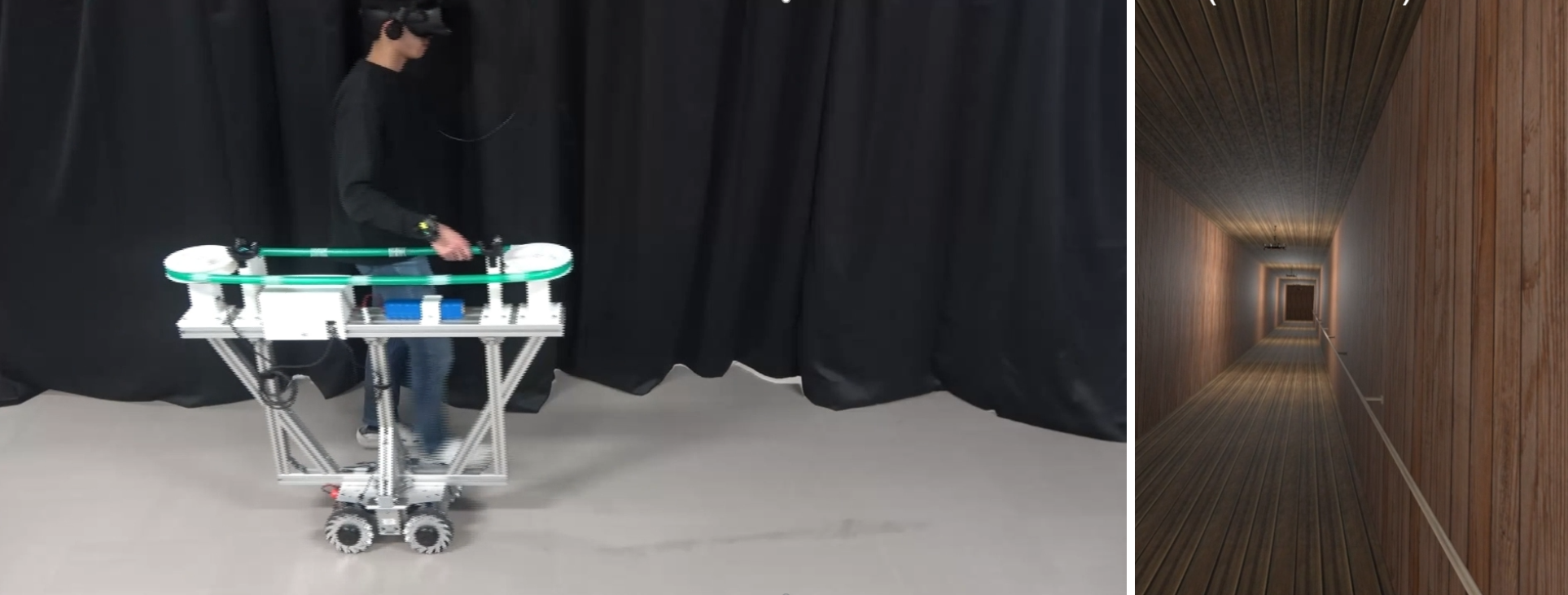
We propose LoopBot, a novel technique to provide endless handrail with haptic feedback from grounded objects using only a single user-following robot. The LoopBot is equipped with a loop-shaped haptic prop attached to an omnidirectional robot that scrolls to cancel out the robot’s displacement, giving the user the haptic sensation that the prop is actually fixed in place, or “grounded.”
This research result was accepted to the ACM Symposium on User Interface Software and Technology (UIST) 2024, the top conference in the field of Human-Computer Interaction, held in Pittsburgh, USA, and an oral presentation was made.
テーマ
Endless handrail with haptic feedback from grounded objects in Cyber/Virtual Space

主な研究成果・対外発表
Results in Japanese are described in Japanese.